Lockheed NP-2H Neptune
NP-2H Neptune byl upravený SP-2H vybavený pokročilými opto-elektronickými senzory. Jednalo se o jediný stroj, který měl v Jihovýchodní Asii otestovat průzkumné možnosti a schopnosti letadla vybaveného několika různými senzory. Projekt nesl označení "Muddy Hill".
| NP-2H | |
| Základní technické údaje: | |
| Rozpětí.......................................... | 31,6 m |
| Délka............................................. | ? m |
| Výška............................................ | 8,5 m |
| Max. rychlost.................................. | ? km/h |
| Dostup........................................... | ? m |
| Dolet............................................. | ? km |
| Hmotnost: | |
| Prázdná......................................... | ? kg |
| Max. vzletová................................. | ? kg |
| Motor: pístový Wright R-3350-32W | |
| Výkon motoru................................. | 2 759 kW |
| Počet motorů.................................. | 2 |
| Pomocné motory: proudový Westinghouse J34-WE-36 | |
| Tah motoru..................................... | 14,4 kN |
| Počet motorů.................................. | 2 |
| Výzbroj: - | |
Taktika VC a NVA, kdy prováděly noční útoky, přesun osob a materiálu v noci a v nepřehledném terénu vedla ke spuštění několika amerických programů. USAF mělo program "SHED LIGHT", US Navy pak program TRIM (Trails, Roads, Interdiction, Multisensor). Projekt "MUDDY HILL" byl jedním z prvních projektů toho programu. Ministerstvu obrany byl předložen 23.července 1965. Projekt sloužil hlavně k otestování možností a schopností letadla vybaveného různými vyhledávacími senzory a přesnější navigací. Samostatně působící letoun měl mít tyto schopnosti:
- Let v noci do předem vybraného bodu.
- Najít a lokalizovat cíl.
- Shromáždit základní zpravodajské informace.
- Označit cíl pro další akce.
- Poskytnout informace pro další analýzu.
Námořní testovací středisko v Patuxent River převzalo operační kontrolu nad projektem. Námořnictvo vybralo k přestavbě letoun SP-2H (BuNo 135582), který byl odeslán v březnu 1966 do LTV Electrosystems, Inc. v Greenville v Texasu, kde měla být provedena zástavba senzorů. Později byl letoun přeznačen na NP-2H.
NP-2H - senzory a vybavení:
Senzory:
Navigační vybavení:
Další vybavení:
Letoun byl celý přelakován lesklou černou barvou. Kromě gondol s TFR a LLLTV byl nápadný i dlouhým ráhnem na přídi. Nebylo to zařízení k tankování za letu, ale bylo na něm umístěné čidlo ke sledování úhlu náběhu, potřebné ke spolupráci s TFR.
Během léta 1966 byla zformována malá jednotka - letová posádka a členové údržby - která měla upravený letoun provozovat. Vybraní členové jednotky byli odesláni do LTV Electrosystems, kde se seznamovali s novým vybavením.
Podle původních předpokladů měl být NP-2H připraven k nasazení v jihovýchodní Asii v prosinci 1966. Ale instalace systémů vysoce vývojového charakteru nabrala zpoždění. Po dokončení úprav následovaly letové zkoušky a testy systémů. Nejprve přímo v Texasu, poté v severní Kalifornii. V červenci se projekt "Muddy Hill" přesunul do NATC Patuxent River, kde proběhly konečné přípravy před nasazením v jihovýchodní Asii.
Ještě během července přelétla posádka letadlo na thajskou základnu Udorn, kam je následovali i členové pozemního personálu. V Udornu byl projekt "Muddy Hill" "ukryt" v komplexu, který využívala společnost Air America. Odtud od 2.srpna vzlétal NP-2H k operačním, zkušebním a testovacím letům. Lety byly prováděny ve dne i v noci, nejčastěji trvaly 4-5 hodin. Nad Laosem byly lety prováděny v oblasti Hočiminovy stezky v severním Laosu i Sihanoukovy stezky v jižním Laosu. Poslední let byl uskutečněn 26.listopadu 1967.
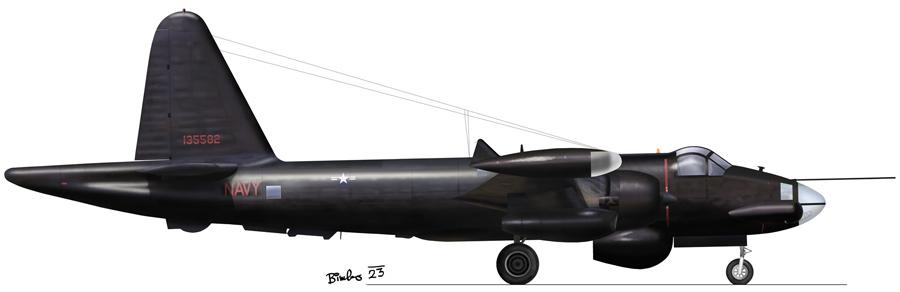
NP-2H (BuNo 135582) projekt "Muddy Hill", 1967.
Existují dva veřejně přístupné zdroje, ze kterých se dá dozvědět o projektu "Muddy Hill".
Jedním je Robert "Bob" Zafran, člen posádky. Druhým zdrojem je zpráva, kterou vypracovali dva příslušníci USAF,
kteří od prosince 1966 působili u projektu jako styční důstojníci. Jejich poznatky
měly být využity u podobného programu USAF s názvem "Shed Light".
Zatímco Bob Zafran píše pouze o tom, že projekt úspěšně vyzkoušel nové systémy, zpráva
letectva vyznívá dost kriticky.
FLIR dokázal detekovat vozidla na dvouproudé silnici, ale už ne na úzkých cestách nebo pod vegetací. Taktéž nedokázal detekovat lodě na řece, které byly zachyceny na DLIR. Z celkových 62 letů byl FLIR 22 letů nefunkční, hlavně kvůli problémům s chlazením.
Přední kamera systému DLIR byla poškozena a zprovozněna až 20.září. Podobně jako u FLIR bylo i na snímcích z DLIR obtížné odhalit vozidla na úzkých cestách. Na snímcích se daly dobře rozeznat lodě na řece a vozidla na širších, dvouproudých silnicích i cestách.
LLLTV nebyla většinu času v provozuschopném stavu (nefunkční 34 letů ze 62). Od počátku měl přenášený obraz vady.
Velká část obrazu byla rozmazaná kolem světlé skvrny. Tento stav se zhoršoval, proto byl systém koncem září
odeslán zpět k výrobci. Zpět namontován do letadla byl
15.listopadu, 10 dní před ukončením testů. Systém nebyl navržen pro detekování cílů, takže nebylo ani velkým překvapením, že nedokázal
vozidla zobrazit. Při optimálním svitu měsíce se dal systém dobře použít jako navigační pomůcka.
Poznámka: LLLTV od výrobce Dalmo-Victor nesly i A-1E "Tropic Moon I". Při dalších
fázích projektu "Tropic Moon II" (B-57B) a "Tropic Moon III" (B-57G) byly použity
LLLTV od výrobce Westinghouse. To by mohlo naznačovat, že LLLTV od Dalmo-Victor nebyla příliš dobrá.
V případě Aktivního magnetického detekčního systému (AMDS) se jednalo o prototyp, který byl nainstalován
za účelem shromáždění údajů, které byl mohly ukázat možnosti systému, odhalit jeho slabá místa a
poskytnout vodítka pro další vývoj. Systém dokázal detekovat vozidla pouze sporadicky a zaznamenal
mnoho rušivých vlivů. Bylo zřejmé, že systém bude potřeba dále kalibrovat.
Poznámka: O dalším vývoji AMDS nelze nalézt žádné další informace. Přednost dostal nejspíše systém "Black Crow",
který dokázal odhalit neodrušené zapalování motorů a vycházel z detektoru magnetických anomálií (MAD).
Tento systém byl ale pasívní, tedy nic nevysílal ani nevyzařoval, pouze přijímal.
Podobně jako AMDS nedokázal cíl identifikovat, pouze odhalit.
Ani navigační systémy nebyly úplně bez chyby. Původním záměrem bylo skrze počítač
Verdan propojit AN/ARN-78 a LN-15, ale počítačový program nebyl schopný přijímat data současně z obou systémů.
Navíc LN-15 nepracoval úplně správně. Když se před koncem nasazení povedlo technikům LN-15 uspokojivě zprovoznit,
selhal systém AN/ARN-78, takže ani poslední pokus o integraci systému nemohl být proveden.
Také mapový zobrazovač AN/ASN-67 nepracoval nikdy správně a to i přesto, že byl dvakrát vrácen
k přepracování.
Dopplerovská radarová souprava APN-153 spolupracovala dobře i s počítači Verdan a ASN-25, ale nebyla
úplně vhodná pro získávání přesných navigačních údajů.
TFR pracoval uspokojivě, nevýhodou bylo, že posádka mohla zvolit pouze jeden mód letu, buď kopírování terénu, nebo vyhýbání se terénu. V hornatém Laosu by bylo potřebné využívat oba módy současně.
Stručný závěr zprávy zní: "Hodnota projektu spočívá v uplatnění získaných zkušeností a v eliminaci odhalených nedostatků v navazujících programech". Nebo-li všechno bylo špatně, ale už víme, jak to příště udělat lépe.
O tom, že všechno nebylo v pořádku svědčí i průběh nasazení v SEA. Původní plán nasazení počítal s tříměsíčním pobytem v Udornu za účelem provádění průzkumu nad Laosem a další tři měsíce na základně Tan Son Nhut, odkud měl provádět průzkum v deltě Mekongu a pobřežních oblastí Jižního Vietnamu. Ale kvůli přetrvávajícím problémům se senzory a s vybavením , nařídil náčelník námořních operací prodloužit pobyt v Udornu o další měsíc a vyškrtnout celou vietnamskou fázi. Projekt byl ukončen 1. prosince 1967, NP-2H se vrátil do Spojených států.

NP-2H v Japonsku během přeletu mezi USA a Thajskem, 27.7.1967.

NP-2H na základně Udorn.

NP-2H na letišti kdesi v jihovýchodní Asii, údajně Tan Son Nhut, i když podle PSP je pravděpodobnější thajská základna Nakhon Phanom.
| US NAVY | |||||
| Křídlo | Jednotka | Typ | Tailcode | Datum | Základna |
| Task Group 50.8 | NP-2H | - | VII.1967 - 1.XII.1967 | Udorn (Thajsko) | |